Build
Team A Robot
The Robot
This is a great place to add a tagline.
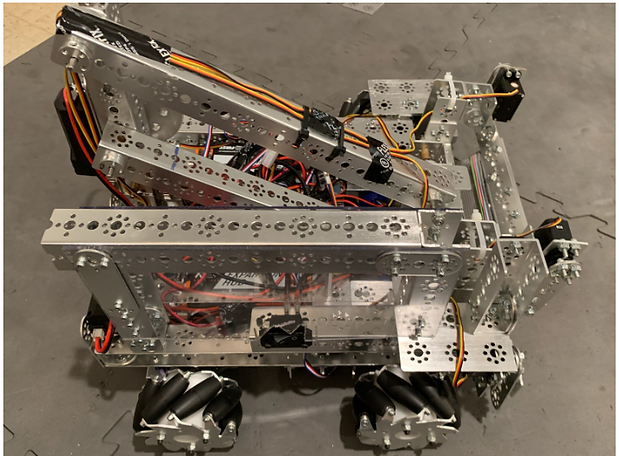
The main criteria for the design of our robot was speed. This is represented throughout the robot’s subsystems. Our drive-train uses Mecanum wheels, allowing the robot to strafe. This increases speed by requiring less turning.
The 4-bar was used because it keeps the intake mechanism parallel to the floor from ground position to full extension. Because of this design choice, we did not need to include a “wrist joint” or any additional motors on the intake for swiveling. The entire 4-bar lift mechanism was mounted on a swivel, meaning the collection and deposit mechanism could occur without the robot turning around.
Combined with strafing, the swivel design was chosen to prioritize the speed of stacking the blocks. Another important aspect to speed is simplicity, which is why our robot only has one main system: the arm. This allows us to focus our practice and debugging into only one moving part.
Drive Train
Mecanum Wheels
(4-wheel drive) for strafing
Intake / Outake
-
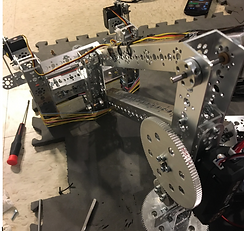
4-Bar Lift
-
Driven by 1:3 gear ratio
-
Mounted on a pivot with a 1:3 gear ratio
-
Collection mechanism mounted on the end of the lift (driven by servos)
-
Includes foam padding for extra grip on the blocks
-
-